近年、製造現場や物流拠点において、カメラやレーザーを用いた従来の「目(ビジョンセンサ)」に依存した自動化は、その限界を迎えつつあります。対象物がロボットアームの死角に入るオクルージョン(隠蔽)問題、工場の照明条件の変化による認識エラー、透明・反射材を扱う際の誤検知など、視覚のみでは解決できない物理的制約が山積しているためです。さらに、世界的な労働人口の減少と熟練工の高齢化が加速する中、産業界はこれまでの「決められた位置で、決められた動作を繰り返す」位置制御ベースの自動化から、「未知の対象物に対して、自律的かつ柔軟に適応する」次世代の自動化へとフェーズを移行させる必要に迫られています。
そこで現在、世界のトップエンジニア、研究機関、そしてビジョナリーな投資家たちが熱視線を送っているのが、ロボットに「皮膚感覚」を与えるデバイス群、すなわち『触覚センサ(タクタイルセンサ)』です。本記事では、人間の繊細な感覚を機械に代替させることでもたらされる圧倒的な産業的価値から、各センシング方式の裏にある物理学的原理と技術的特性、実装現場(SIer)が直面する生々しい課題、競合技術との明確な棲み分け、そして2030年を見据えたAIとロボティクスの未来予測まで、テクノロジー専門メディア「TechShift」が圧倒的な解像度で紐解きます。DX・自動化の最重要ピースである触覚技術の全貌を、日本一詳しく解説します。
- 触覚センサとは?ロボット開発と工場自動化で今注目される理由
- 触覚センサの基本原理と「暗黙知」のデジタル化
- 視覚偏重システムからの脱却とDX推進における重要性
- 【比較解説】触覚センサの種類と仕組み・技術的特性
- 静電容量式・抵抗膜式の仕組みとメリット・デメリット
- 圧電式・光学式アプローチとその高度な応用
- 磁気式・MEMS式など最先端・特殊用途向けアプローチ
- 実務に直結!用途・目的別に見る最適な触覚センサの選定ポイント
- ピッキングや協働ロボットなど「用途別」の選定基準
- SIer視点で見るシステム統合の課題と費用対効果
- 技術的な落とし穴:実装現場で陥りやすい失敗と対策
- 触覚センサの実用化事例と次世代トレンド「ソフトロボティクス」
- 製造業・医療・アグリテックにおける導入事例と成果
- 代替技術(ビジョンAI・力覚センサ)との比較と棲み分け
- ソフトロボティクスと新素材(フィルム・ゴム)による革新
- TechShift独自考察:触覚センサが切り拓く未来と産業インパクト
- 触覚データと次世代エッジAI(SNN)の融合による高度自律制御
- 2026〜2030年の予測:基盤モデルのマルチモーダル化(VLTA)
- DX・新規事業企画に向けた投資シナリオと技術ロードマップ
触覚センサとは?ロボット開発と工場自動化で今注目される理由
触覚センサの基本原理と「暗黙知」のデジタル化
触覚センサの表面的な定義は、「対象物との物理的な接触によって生じる圧力(法線方向の力)、剪断力(横方向の力)、滑り、振動、温度などの物理パラメータを電気信号へと変換するハードウェア」です。しかし、実務的・経営的な観点から言えば、その真の役割は「熟練工の指先に宿る『暗黙知』の完全なデジタル化」に他なりません。
従来のロボットアームが主流としてきた「位置制御」は、指定されたXYZ空間座標へ移動し、プログラミングされた一定の力でエンドエフェクタ(ハンド)を閉じるという静的かつ一方向的な動作です。対象物の位置やサイズがミリ単位で確定している剛体(金属部品など)であれば問題ありませんが、不定形物や柔軟物を扱う際には破綻します。これに対し、触覚センサを実装したシステムは、「対象物の反発力や表面の摩擦係数に応じて、ミリ秒単位でリアルタイムに力加減を調整する」という動的なフィードバック制御(インピーダンス制御やアドミタンス制御の先を行く、感覚器ベースの自律制御)を可能にします。
特に最新の製造・物流ラインにおいて、触覚センサが果たす決定的な役割は以下の3点に集約されます。
- 把持状態のリアルタイム最適化(マイクロ・スリップ検知): 対象物との間に生じる微小な高周波振動から「滑り出しの初期兆候(マイクロ・スリップ)」を検知します。対象物が指先から完全に滑り落ちる直前、あるいは過剰な力で押し潰す直前に、把持力を自律補正し、最適なグリップを維持します。
- 材質・状態のダイナミック判別(テクスチャ認識): 接触時の圧力分布と反発力プロファイルから、対象物が「硬いプラスチック」か「熟した果実」か、あるいは「布製品」かを瞬時に識別します。これにより、取り扱いスピードや後段のプロセスを自動で動的に切り替えることが可能です。
- 超精密なはめ込み・研磨のブラインド自動化: コネクタの挿入、ギアの噛み合わせ、あるいは曲面の研磨作業など、視覚では確認できないミクロン単位のズレや表面粗さを「接触の反力分布」として捉え、軌道を自律修正しながら作業を完遂させます。
視覚偏重システムからの脱却とDX推進における重要性
では、なぜ今、DX推進の文脈においてこれほどまでに触覚技術への投資が急加速しているのでしょうか。最大の理由は、AI技術(特に機械学習モデルの軽量化)の成熟と、次世代マテリアルを用いたセンサハードウェアの進化が交差する「特異点」を現在迎えているためです。
近年、人間と同じ空間で柵なしで作業を行う協働ロボット(Cobot)の急速な普及が触覚技術の需要を押し上げています。ここで鍵を握るのが、ロボットのアーム表面や関節部を広範囲に覆うことができるナノマテリアルベースのフィルム化技術です。これにより、ロボットは点(指先)だけでなく「面(皮膚)」として全方位からの接触や接近を捉えることができるようになりました。意図しない人間との接触を瞬時に検知して安全停止・退避行動をとるなど、国際的な安全基準(ISO 15066等)を高い次元でクリアしつつ、より人間に近い作業空間での共存を実現しています。
以下は、視覚のみに依存した従来型の自動化システムと、最先端の触覚センサを統合した次世代型システムにおける、ビジネス・実務的インパクトの比較です。
| 比較項目 | 従来型(視覚偏重システム) | 次世代型(視覚+触覚統合システム) |
|---|---|---|
| ピッキング対象の柔軟性と多様性 | 定型物、硬い素材、位置・姿勢が完全に固定された剛体部品に限定。 | 不定形物、柔軟物(食品、パウチ、ケーブル)、未登録の混載状態の部品にも自律適応。 |
| 外乱・環境変化への耐性 | 照明の明暗差、ハレーション、死角(オクルージョン)に極めて弱く、即エラーに繋がる。 | 視覚の死角に入っても、接触時の力覚フィードバックとテクスチャ認識で確実な作業を継続可能。 |
| エラーリカバリと稼働率(OEE) | 把持失敗時にプロセス全体が停止し、重大なダウンタイムと人手による復旧作業が発生。 | 滑り検知により瞬時に把持力を再調整し、把持失敗自体を未然に防ぐことで連続稼働を実現。 |
| 投資対効果(ROI)の源泉 | 単純な搬送作業の代替。タスクが限定的で費用回収に時間がかかるケースが多い。 | 熟練工の「勘と経験」の代替、製品歩留まりの劇的改善、インラインでの品質検査同時実行による圧倒的ROI向上。 |
現代の触覚技術は、単なるロボットのオプションパーツという位置づけから、企業の製造競争力や物流インフラの強靭性を根本から底上げする「戦略的エッジデバイス」へと変貌を遂げています。
【比較解説】触覚センサの種類と仕組み・技術的特性
ロボットが人間と同等以上の器用さを獲得するためには、タスクに合致した最適なデバイス選定が成否を分けます。単に「対象物に触れたか」を検知するスイッチ的役割を超え、物体の硬さ、滑り、重心の微細な変化をリアルタイムで捉えるには、各センサが利用している「物理的アプローチ」を深く理解する必要があります。本セクションでは、現在産業界で主流となっているセンサ方式から、最先端の研究領域で注目される方式まで、その仕組みと技術的特性を徹底比較します。
静電容量式・抵抗膜式の仕組みとメリット・デメリット
産業用ロボットや自動化ラインで最も広範に実装されているのがこの2方式です。アレイ(格子状)化が容易であり、マトリクス構造を持たせることで面的な圧力分布を画像のように取得できます。
- 静電容量式(Capacitive Tactile Sensor):
コンデンサの原理($C = \epsilon \frac{S}{d}$)を応用した方式です。柔軟な誘電体(シリコンやエラストマー)を挟んで対向する電極間に電圧をかけ、外部から圧力が加わって電極間距離($d$)が縮む、あるいはせん断力によって電極の重なり面積($S$)が変化することによる静電容量(キャパシタンス)の変化を捉えます。この方式の最大のメリットは「圧倒的な高感度」と「ヒステリシス(変形からの回復の遅れ)の低さ」です。数グラム単位の微細な力覚を検知できるため、食品や医療品など破損しやすいワークの繊細なピッキングに最適です。一方で、インピーダンスが高いため外部の電磁ノイズ(EMI)に極めて敏感であり、強力なサーボモーターの近傍で使用するには、厳密なシールド設計と高度な信号処理回路が不可欠という技術的ハードルがあります。 - 抵抗膜式(Piezoresistive Tactile Sensor):
物理的な接触によって生じる導電材(カーボン粒子を練り込んだゴムなど)の接触面積・距離の変化を、電気抵抗値の変動として読み取る方式です(ピエゾ抵抗効果)。構造が極めてシンプルで製造コストが安く、電磁ノイズに強いため環境耐性に優れます。そのため、工場の安全柵を代替し、協働ロボットの全身を覆う衝突検知用「ロボットスキン」や、大型グリッパの接触検知マットなどで多用されます。半面、素材の特性上、感度の非線形性や長期間使用による経年劣化(ドリフト)、応答速度の限界があるため、緻密な指先操作よりも静的・広域な安全制御に向いています。
圧電式・光学式アプローチとその高度な応用
さらに高度なマニピュレーションや、特殊な物理現象をピンポイントで捉えるためには、全く異なる物理現象を利用した革新的なアプローチが求められます。
- 圧電式(Piezoelectric Tactile Sensor):
圧電素子(PZTやPVDFポリマーフィルム)に外部から動的な応力が加わった際に生じる起電力(圧電効果)を利用します。この方式の強みは「超高速な応答性(メガヘルツ帯域)」に尽きます。静的な圧力(ずっと押し付けている状態)の継続的な測定には不向きですが、物体がロボットの指先から滑り落ちる瞬間の高周波振動をミリ秒未満で検知できます。未知の重量や摩擦係数を持つ対象物を「落とさない最低限の力」で保持するダイナミック・グリップ制御において、中核的な役割を果たします。 - 光学式(Optical Tactile Sensor):
透明なエラストマー(弾性体)の内部に小型カメラや光源(LED)を配置し、物体接触時のエラストマー表面の微細な変形を画像として捉える最先端の方式です(MIT発の「GelSight」などが有名)。エラストマー内側にマーカーを印刷しておき、接触時のマーカーの変位(オプティカルフロー)から3軸の力ベクトルを高精度に再構築します。最大のメリットは、対象物の表面テクスチャをミクロン単位の超高解像度画像として取得できる点です。これを深層学習(CNN等)と連携させることで、「触っただけで材質を判別し、微小な欠陥を発見する」といった人間の知覚を超える認識が可能になります。小型化に限界がありましたが、近年のマイクロカメラの進化により指先への実装が急増しています。
磁気式・MEMS式など最先端・特殊用途向けアプローチ
近年、過酷な工場環境(オイル、粉塵、高温)に耐えうる次世代センサとして注目されているのが磁気式とMEMS式です。
- 磁気式(Magnetic Tactile Sensor):
柔軟な素材の内部に永久磁石を埋め込み、下部の基板に配置したホール素子(磁気センサ)で磁束密度の変化を計測します。圧力が加わって磁石の位置が変わると、3次元方向の変位を非接触で算出できます。シリコンやゴムなどの素材と電子基板が完全に物理的に分離されているため、防水・防油・防塵性を極めて高く設計でき、金属加工現場や食品洗浄ラインなど過酷な環境での耐久性に優れます。 - MEMS式(Micro Electro Mechanical Systems):
半導体製造プロセスを用いて、シリコン基板上にミクロン単位の微小な機械構造(カンチレバーやダイヤフラム)を形成したセンサです。極めて小型かつ高感度であり、人間の指先にある感覚受容器(マイスナー小体など)の空間分解能を超える密度でのアレイ化が可能です。医療用のマイクロマニピュレータや、血管内カテーテル先端への実装など、究極の精密さが求められる領域で研究が進んでいます。
実務に直結!用途・目的別に見る最適な触覚センサの選定ポイント
前セクションで解説したように、触覚センサには多様な方式が存在します。しかし、製造現場や物流拠点でのDXにおいて「とにかく一番高精度・高分解能なデバイスを導入すれば課題が解決する」というアプローチは極めて危険であり、多くの場合プロジェクトの頓挫を招きます。自社の課題に最適なデバイスを選定するには、動作環境の制約、タスクの難易度、そして後段のデータ処理能力(コントローラ側の制約)を総合的に評価する必要があります。
ピッキングや協働ロボットなど「用途別」の選定基準
プロジェクトの成否を分けるのは、対象となるタスクの特性(What)に合わせたセンサ方式の選択です。以下に、代表的な用途別の選定基準と求められる仕様を整理します。
| 想定用途・タスク | 最適なセンサ方式の候補 | 求められる仕様・選定基準 |
|---|---|---|
| 多品種不定形ピッキング(食品、日用品、パウチ) | 静電容量式 / 光学式 / 圧電式 | 垂直方向の圧力だけでなく、せん断力(スリップ検知)を高感度に検出できること。ミリ秒単位の高速応答性。 |
| 協働ロボットの安全・ティーチング | 抵抗膜式 / フィルム状静電容量式 | ロボットアーム全体を覆うための大面積施工性と曲面追従性。衝撃に耐える堅牢性と低コスト性。 |
| 精密組立・インライン品質検査 | 光学式 / 磁気式 / 高剛性MEMS | ミクロン単位の誤差を修正するための多軸方向の正確な力ベクトル検出。高い空間分解能とテクスチャ認識力。 |
| 過酷環境でのハンドリング(工作機械の周辺、食品洗浄) | 磁気式 | 切削油や洗浄液、粉塵に対する完全な密閉性(IP67/IP69K相当)。基板と接触部の物理的非接触構造。 |
SIer視点で見るシステム統合の課題と費用対効果
最適なセンサを選定したとしても、現場への実装フェーズで最大の障壁となるのが「システム統合(インテグレーション)」の難易度です。ロボットSIerの視点から見ると、ハードウェアのカタログスペック以上に、「既存制御システムへの組み込みやすさ」と「データ処理パイプラインの構築負荷」が総所有コスト(TCO)に直結します。
- 配線地獄(ワイヤリング問題)と通信プロトコル:多点マトリクス構造の触覚アレイは、そのままでは配線数が膨大になり、ロボットアームの稼働部における断線リスクやスリップリング(回転接点)の限界を超えます。これを防ぐため、センサの直近にADコンバータとマイクロコントローラを内蔵し、I2CやSPIといった基板間通信から、EtherCATやPROFINETなどの産業用イーサネットへ省配線で変換・直結できるアーキテクチャが必須要件となります。
- エッジAIによるデータ軽量化:数千のタクタイクセル(触覚画素)から毎秒数百回のサンプリングを行うと、上位のPLCやROS/ROS2コントローラの通信帯域と計算リソースが瞬時にパンクします。最新システムでは、センサ側でエッジAIが前処理を行い、「生の波形データ」ではなく「スリップ発生のフラグ」や「適正な把持力の目標値」といった軽量な特徴量のみをホストへ送信する分散処理技術が標準化されつつあります。
技術的な落とし穴:実装現場で陥りやすい失敗と対策
実用化に向けたPoC(概念実証)フェーズで多くの企業が陥る「技術的な落とし穴」と、その回避策を明記します。
- 「高分解能すぎることの罠」: 指先の解像度を上げすぎた結果、微小な機械振動(モーターのノイズや搬送ベルトの揺れ)まで全て「接触」として拾ってしまい、AIが誤判定を繰り返すケースが散見されます。タスクに必要な最低限の分解能を見極め、ローパスフィルタ等でノイズを適切にカットする前処理設計が重要です。
- 素材のヒステリシスと経年劣化(ドリフト): 触覚センサの表面を覆うシリコンやウレタンゴム素材は、変形からの回復遅れ(ヒステリシス)や、温度変化・繰り返しの圧力によるゼロ点のズレ(温度ドリフト・経年ドリフト)が避けられません。SIer泣かせのこの物理的制約を解決するため、ハードウェアの改良だけでなく、ソフトウェア側でタスクの合間にリアルタイムにゼロ点補正を行う「オートキャリブレーション機能」をシステムに組み込むことが、長期安定稼働の絶対条件となります。
触覚センサの実用化事例と次世代トレンド「ソフトロボティクス」
製造業・医療・アグリテックにおける導入事例と成果
適切な要件定義とシステム統合を乗り越え、触覚センサを実ビジネスの価値へと変換した最前線の「導入事例」を紐解きます。単なる力の計測を超え、不確実性の高い環境下での自律制御がいかに産業にインパクトを与えているかがわかります。
- 物流・食品製造におけるマスターレス・ピッキング: 大手物流倉庫や惣菜工場では、硬い段ボール、ビニール梱包された衣類、潰れやすい青果物が混載されたビンの中から、事前の3DCADデータ(マスターデータ)なしにピッキングを行うシステムが実稼働しています。指先の静電容量式触覚センサが滑り(マイクロ・スリップ)を検知し、エッジAIが瞬時に把持力を最適化することで、未知の物体の把持成功率が従来比で30%以上向上(98.5%達成)し、落下による製品損害(シュリンク)をほぼゼロに抑え込んでいます。
- 医療分野におけるサージカルロボット(遠隔手術): 術者の操作コンソールに対して、患者の体腔内にあるメス先が感じる「硬さ」や「反発力」をハプティクス(力覚フィードバック)として伝えるシステムが実用化フェーズに入っています。微小な組織の反発を正確にセンシングすることで、縫合糸の引きちぎれや脆弱な臓器・血管の損傷リスクを劇的に低減させ、手術の安全性と精度を別次元へ引き上げています。
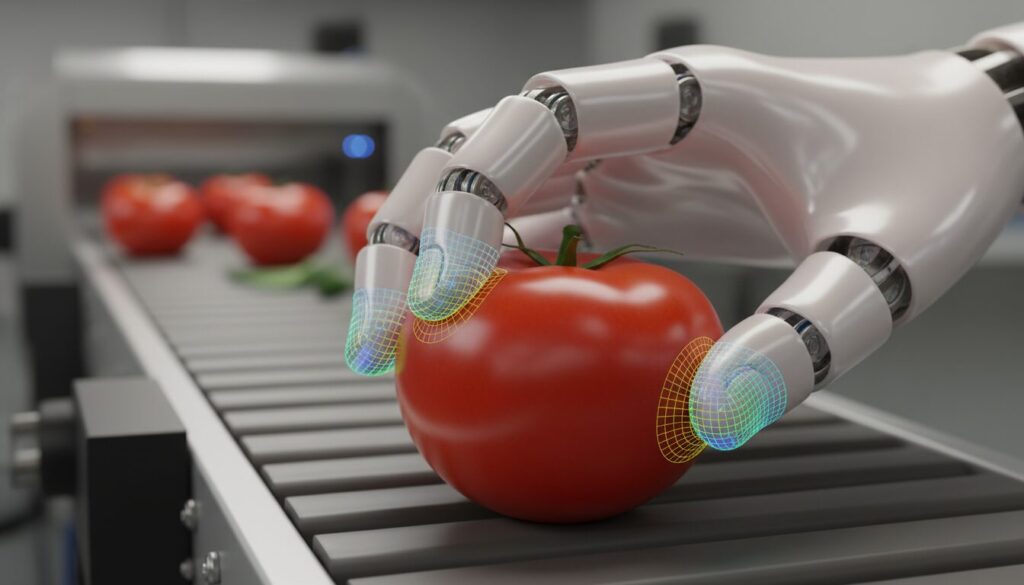
- アグリテック(農業自動化)における収穫ロボット: トマトやイチゴなど、傷つきやすく熟度が個体ごとに異なる果実の自動収穫において、光学式や静電容量式の触覚センサが活躍しています。対象を優しく包み込み、表面の反発力(硬さ)から「完熟度」を判定し、最適なタイミングのものだけを傷つけずに収穫・仕分けする作業が、ロボットによって24時間体制で行われています。
代替技術(ビジョンAI・力覚センサ)との比較と棲み分け
ここでよく生じる疑問が「高精度なビジョンAIや、既存の6軸力覚センサ(フォーストルクセンサ)ではダメなのか?」という点です。結論から言えば、これらは競合するのではなく「補完・棲み分け」の関係にあります。
ビジョンAI(カメラ)は、ロボットが対象物に近づきすぎるとピントが合わず、手先自体が邪魔になって対象が見えなくなる「オクルージョン問題」に直面します。視覚は「接近するまでの大まかな軌道計画」に優れていますが、接触した瞬間のミクロな制御には不向きです。
一方、ロボットの手首に装着される「6軸力覚センサ」は、手首にかかる合力(全体の重さや押し付ける力)を高精度に測ることはできますが、指先のどこに圧力が集中しているか(分布力)や、指の端から物体が滑り落ちようとしている局所的な現象を検知することは原理的に不可能です。したがって、重量物の搬送や強力な押し込み作業は「力覚センサ」で、不定形物の繊細なハンドリングやテクスチャ判別は「触覚センサ(タクタイルセンサ)」で担うというアーキテクチャが、今後の自動化のスタンダードとなります。
ソフトロボティクスと新素材(フィルム・ゴム)による革新
ロボット工学における最大のパラダイムシフトとして、「ソフトロボティクス」領域への研究開発投資が急増しています。金属や硬質プラスチックで構成された従来の剛体ロボットとは異なり、生物の筋肉や皮膚の柔軟性を模倣したソフトロボットには、その連続的な変形に追従できる新しい次元のセンサが不可欠です。
ここでブレイクスルーをもたらしているのが、導電性エラストマー、カーボンナノチューブ(CNT)、そして液体金属を用いた新素材と、最先端の「フィルム化技術」です。数ミクロン単位の薄さと極めて高い伸縮性(ストレッチアビリティ)を兼ね備えたセンサシートの量産化が進み、ロボットの複雑な3D曲面ジョイントやグリッパー表面全体に「人工皮膚(電子スキン)」をシームレスに実装することが可能となりました。
さらに最新の研究では、鋭利な物体で物理的な損傷を受けても、常温で自律的に分子結合が回復し導電パスを再構築する「自己修復機能(セルフヒーリング)」を備えたセンサ材料まで開発されています。これにより、メンテナンスフリーで長期間稼働するタフな触覚インターフェースの実現が目前に迫っています。
TechShift独自考察:触覚センサが切り拓く未来と産業インパクト
本セクションでは、ハードウェアの基本機能を解説するに留まらず、取得した触覚データをいかにビジネス価値に変換するかという「AIとの統合」の視点から、ロボティクス市場が迎える次なるブレイクスルーと産業へのインパクトを考察します。
触覚データと次世代エッジAI(SNN)の融合による高度自律制御
膨大な触覚データを遅延なく処理し、ミリ秒単位でフィードバック制御を行うためには、演算のパラダイムシフトが必要です。現在注目されているのが、人間の脳神経系を模倣したニューロモルフィック(脳型)コンピューティングと、スパイク・ニューラル・ネットワーク(SNN)を用いた「イベントベースの触覚処理」です。
従来のセンサが「変化がなくても毎秒数百回データを送信し続ける(フレームベース)」のに対し、イベントベースセンサは「圧力が変化した(触れた、滑った)ピクセルの情報だけを非同期で送信」します。このデータをSNNを搭載したエッジAIチップで処理することで、通信帯域と消費電力を従来の数百分の一から数千分の一に劇的に削減しつつ、マイクロ秒レベルの超低レイテンシで滑り検知と把持力補正を行うことが可能になります。これは、バッテリ駆動が前提となるモバイルマニピュレータ(AGV+アーム)や人型ロボットにおいて、決定的な技術優位性をもたらします。
2026〜2030年の予測:基盤モデルのマルチモーダル化(VLTA)
現在、ロボットAIの分野では、画像(Vision)と自然言語(Language)の指示をもとにロボットの行動(Action)を出力する「VLA(Vision-Language-Action)モデル」が急速に立ち上がっています。GoogleのRT-2などに代表されるこの基盤モデルは、近い将来、確実に「触覚(Tactile)」のモダリティを統合した「VLTA(Vision-Language-Tactile-Action)モデル」へと進化を遂げます。
視覚では見分けがつかない「本物のリンゴ」と「精巧な食品サンプルのリンゴ」を、ロボットが触れた瞬間の反発力や熱伝導率の違いから判別し、言語モデルが「これは偽物なので弾きます」と判断して自律的に行動を修正する。このような、人間の五感に近いマルチモーダルな推論が、2026年から2030年にかけて工場や物流現場、さらには家庭環境に実装されていくと予測されます。
DX・新規事業企画に向けた投資シナリオと技術ロードマップ
DX・自動化を推進する新規事業企画者や経営層にとって、触覚センサ技術は単なる省人化ツールではなく、新たなビジネスモデルを創出するためのコア・イネーブラーです。自社の投資戦略を策定する上で、以下の技術ロードマップと投資シナリオを指標としてください。
| フェーズ | 時期目安 | 技術進化とシステム統合の焦点 | 想定されるビジネス・投資インパクト |
|---|---|---|---|
| Phase 1: 局所的導入と歩留まり向上 | 現在〜2026年 | 特定のエンドエフェクタへの静電容量式・光学式センサの局所実装。単一タスクのピッキング・組み立て精度を極限まで高める。 | 人手不足の直接的解消と初期コストの早期回収。これまで自動化が困難だった非定型物ラインの無人化によるROIの確実な証明。 |
| Phase 2: 全身感覚の獲得と極限協調 | 2026年〜2028年 | フィルム化技術の商用量産。協働ロボットやAGVの表面全体を覆う「ロボットスキン」と、エッジAIによる超低遅延の接触回避行動の実装。 | 安全柵の完全撤廃による工場ライン面積の大幅な削減。人間とロボットの密接な協調作業(セル生産)による多品種少量生産の利益率劇的向上。 |
| Phase 3: 暗黙知のデータ化とRaaS化 | 2029年以降 | VLTA基盤モデルの実装。クラウド上のデジタルツインとメタバース空間へ、リアルタイムな触覚・テクスチャ情報を双方向フィードバック。 | 熟練工の「力加減のコツ」をAIが完全学習。作業スキルそのものをソフトウェアとして横展開する「RaaS(Robot as a Service)」ビジネスモデルの確立。 |
触覚センサ技術は、ロボットが物理世界とインタラクションするための「最後の壁」を打ち破る鍵です。単一のハードウェアスペックに惑わされることなく、エッジAIによるデータ解析からクラウド基盤モデル連携に至るプラットフォーム全体の拡張性を見据え、戦略的なアプローチと早期のPoC実行へと踏み出すことが、次世代の産業競争力を決定づけるでしょう。
よくある質問(FAQ)
Q. 触覚センサ(タクタイルセンサ)とは何ですか?
A. 触覚センサとは、ロボットや機械に人間の「皮膚感覚」を与えるデバイスのことです。対象物の硬さや滑り具合などを検知し、未知の物体に対しても自律的かつ柔軟に適応する次世代の自動化を実現します。労働人口の減少や熟練工の高齢化が進む中、工場自動化やDX推進における最重要ピースとして注目されています。
Q. 触覚センサとビジョンセンサの違いは何ですか?
A. ビジョンセンサがカメラ等を用いた「目」の役割を果たすのに対し、触覚センサは直接触れて状態を検知する「皮膚」の役割を担います。ビジョンセンサはロボットアームの死角(オクルージョン)や照明の変化、透明・反射材の誤検知といった限界がありますが、触覚センサを組み合わせることでこれらの物理的制約を克服できます。
Q. 触覚センサにはどのような種類がありますか?
A. 触覚センサには物理学的原理に基づいた複数の種類があります。代表的な静電容量式や抵抗膜式をはじめ、高度な応用が可能な圧電式や光学式、最先端の磁気式やMEMS式など多岐にわたります。ピッキング作業や協働ロボットの制御など、実際の用途やシステム統合時の費用対効果に合わせて最適な方式を選定します。